The robotics industry is undergoing a transformation driven by the demand for precision, compactness, and power. As bionic robots, dexterous robotic hands, and industrial automation systems become more sophisticated, the need for highly integrated, customizable micro joint actuators has never been greater. Engineers and system integrators face a persistent challenge: finding actuator solutions that deliver high torque density, precision motion control, and seamless integration—all within increasingly constrained physical footprints.
The Evolution of Micro Actuation Technology
Traditional actuator systems often struggle to balance size, performance, and reliability. Standard servo motors paired with external gearboxes introduce complexity, increase weight, and compromise system integration. The industry has long sought a solution that combines motor, gearbox, and encoder into a single, compact module without sacrificing performance metrics critical to advanced applications.
This challenge is particularly acute in applications requiring human-like dexterity, such as robotic hands for surgical assistance or collaborative robots working alongside humans. These systems demand not only high precision and torque but also customizable configurations that can adapt to diverse mechanical designs and operational requirements.
Understanding Micro Joint Module Architecture
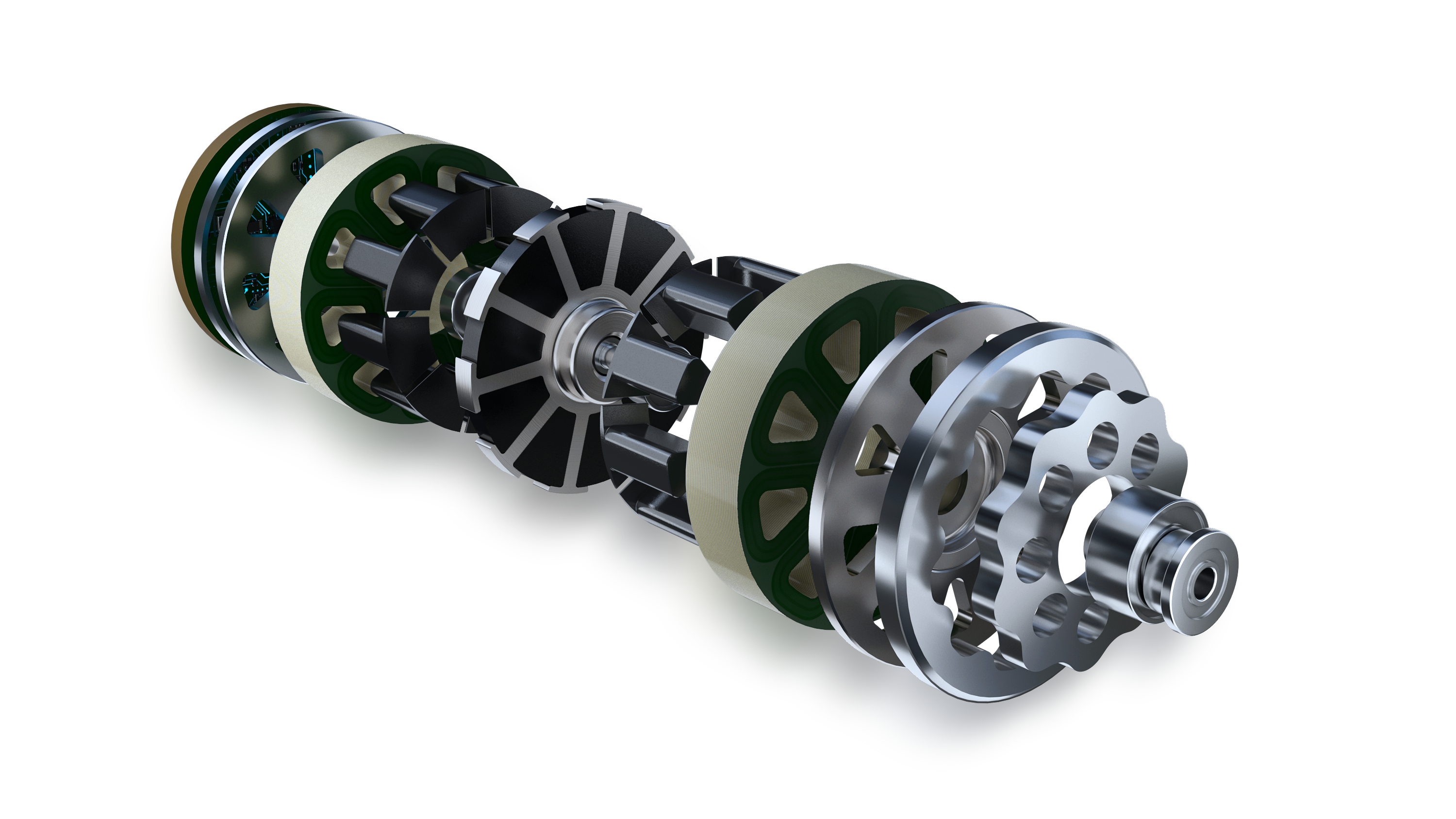
Modern micro joint actuators represent a convergence of three critical technologies: axial flux motors, micro cycloidal gear reducers, and non-contact absolute magnetic encoders. This integration approach fundamentally changes how engineers approach robotic joint design.
Axial flux motors provide exceptional power density by orienting magnetic flux parallel to the motor shaft, enabling flat, compact designs that maximize torque output relative to volume. Unlike conventional radial flux motors, this architecture delivers superior performance in constrained spaces.
Micro cycloidal gear reducers offer distinct advantages over planetary or harmonic drive alternatives. The multi-point contact design distributes load across multiple gear teeth simultaneously, resulting in higher rigidity, reduced backlash, and improved torque transmission efficiency. In precision applications where positional accuracy directly impacts performance, backlash levels of 15-20 Arcmin represent a significant competitive advantage.
Non-contact absolute magnetic encoders eliminate the need for homing sequences after power cycles, providing immediate position feedback with high resolution. This integration simplifies system initialization and enhances reliability by eliminating mechanical wear associated with contact-based sensors.
Customization Dimensions for Application-Specific Requirements
The most sophisticated micro joint solutions offer extensive customization options across multiple dimensions, enabling engineers to optimize performance for specific application requirements.
Diameter scaling represents the first customization axis. Modules ranging from Φ16mm to Φ30mm address different load capacities and spatial constraints. Compact Φ16mm modules weighing as little as 24.3g enable highly integrated robotic fingers with minimal inertial impact, while Φ30mm variants delivering continuous stalling torque up to 1500 mNm support heavier-duty industrial applications.
Gear ratio selection directly influences the speed-torque tradeoff. Available ratios ranging from 15 to 50 allow engineers to configure modules for high-speed precision positioning or high-torque load manipulation. A Φ20mm module with ratio 15 delivers rapid motion response, while the same platform configured with ratio 50 provides stalling torque reaching 450 mNm—sufficient for supporting substantial mechanical loads in compact robotic joints.
Voltage compatibility across 12V, 24V, and 48V DC bus systems ensures integration flexibility across different power architectures. This adaptability proves particularly valuable in medical devices operating on battery power, industrial systems with standardized 24V infrastructure, and high-performance robotics leveraging 48V for enhanced efficiency.
Communication protocol options address diverse control system requirements. SPI interfaces provide high-speed, low-latency communication ideal for tightly coupled control loops in dexterous manipulation. CAN FD protocol support enables robust, noise-resistant communication in industrial environments and facilitates complex network architectures for multi-joint robotic systems requiring coordinated motion control.
Thermal management customization accommodates varying duty cycles and ambient conditions. Modules with chassis temperature limits ranging from 80°C to 145°C allow engineers to optimize for continuous operation versus peak performance scenarios, balancing thermal constraints with application-specific power requirements.
Performance Benchmarks Driving Industry Adoption
Real-world implementations demonstrate how customizable micro joint modules address specific industry pain points. In dexterous robotic hand development, engineers have deployed customized Φ16mm and Φ20mm modules to achieve human-like finger articulation. The compact form factor enables anatomically accurate mechanical designs, while integrated encoders provide the positional feedback necessary for delicate manipulation tasks.
Industrial automation applications benefit from Φ25mm and Φ30mm modules configured for precision transmission systems. Gear efficiency reaching 75% in ratio 30 configurations minimizes energy loss, while mechanical backlash controlled to 15 Arcmin ensures repeatable positioning in assembly and inspection operations. The CAN FD communication capability facilitates integration into existing industrial control networks without requiring proprietary interfaces.
Medical robotics represents another domain where customization proves critical. Ultra-compact configurations support minimally invasive surgical instruments where every millimeter matters, while absolute encoder integration eliminates initialization procedures that could disrupt sterile workflows. Voltage flexibility accommodates both portable battery-powered devices and facility-integrated systems.
The VAXOR-MOTOR Approach to Integrated Actuation
VAXOR-MOTOR has established itself as a provider of integrated micro-actuation solutions by addressing the core challenges facing robotics engineers. The company's approach centers on delivering modules that combine axial flux motor technology, micro cycloidal gear reduction, and non-contact encoder integration within standardized, customizable platforms.
The technical foundation includes electromagnetic designs optimized to control phase imbalance within 5% for ultra-micro motors—a critical factor in ensuring high manufacturing yield and consistent performance across production volumes. This design discipline translates directly to reliability advantages in demanding applications where motor failure carries significant consequences.
Product architectures spanning actuator diameters from Φ16mm to Φ30mm provide engineers with scalable options suitable for applications ranging from consumer electronics to industrial automation. The modular design philosophy enables configuration flexibility while maintaining standardized interfaces that simplify integration and reduce time-to-market.
Interface standardization through FPC 7PIN connectors supporting VCC, GND, CS, SCK, MOSI, MISO, and CAL signals demonstrates attention to integration practicality. This standardization reduces custom cabling requirements and facilitates rapid prototyping during development phases.
Strategic Considerations for Module Selection
Engineers evaluating micro joint actuators should assess several critical factors beyond basic torque and speed specifications. Total system inertia impacts dynamic response characteristics—modules with lower rotor inertia enable faster acceleration and more responsive motion control. Thermal characteristics determine sustainable duty cycles, particularly in applications involving repetitive high-load operations.
Mechanical strength limits define peak torque capacity beyond continuous ratings. Understanding these limits proves essential for applications involving shock loads or emergency stop conditions. Communication protocol capabilities influence control system architecture decisions and should align with existing infrastructure or strategic technology directions.
The integration of motor, gearbox, and encoder into a single assembly simplifies mechanical design, reduces part count, and minimizes potential failure points compared to discrete component approaches. This integration advantage becomes increasingly valuable as system complexity scales across multi-joint robotic platforms.
Future Directions in Micro Actuation
The trajectory of micro joint actuator development points toward continued miniaturization without performance compromise, enhanced thermal management enabling higher power density, and increased intelligence embedded within actuator modules themselves. Edge processing capabilities integrated with encoder systems may enable local motion control loops that reduce communication bandwidth requirements and improve response times.
As robotic applications expand into new domains—from collaborative manufacturing to assistive medical devices—the demand for customizable, high-performance micro actuation solutions will continue to grow. Engineers seeking competitive advantages in these emerging markets will increasingly rely on actuation partners capable of delivering not just standard products but configurable platforms that adapt to application-specific requirements.
The evolution from discrete motor-gearbox-encoder assemblies to integrated, customizable micro joint modules represents more than a packaging improvement. It signifies a fundamental shift in how engineers approach robotic system design, enabling new levels of integration, performance, and reliability that were simply unattainable with previous-generation technologies.
www.vaxor-motor.com
Suzhou Vaxor-motor CO.,LTD.
